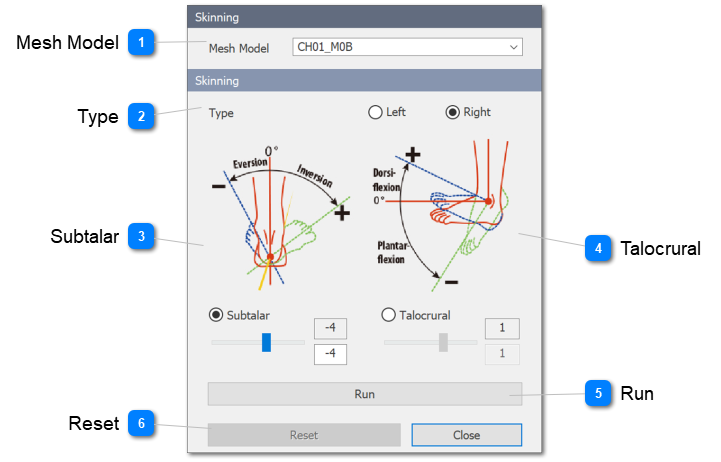
skeleton 축을 사용하여 발 관절 각도를 변형합니다.
 Mesh Modelskeleton이 있는 대상 메시 모델을 선택합니다.
|
|
 Type대상 메시 모델에 따라 왼발 또는 오른발을 선택합니다.
스켈레톤 생성된 발 모델은 왼발과 오른발을 자동으로 인식합니다.
|
|
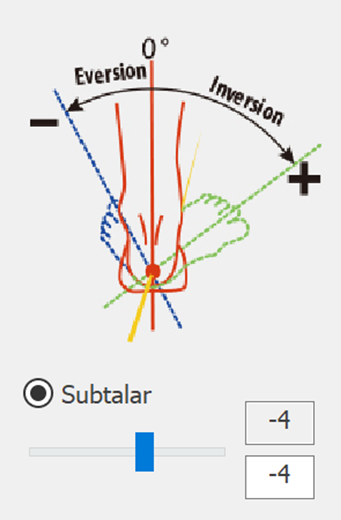
 SubtalarSubtalar는 subtalar joint(거골하관절)의 좌, 우 발목의 각도를 제어합니다.
Subtalar 패널의 값은 현재 스캔 된 모델의 각도를 표시합니다. 그리고 스크롤바 옆에 상자에 좌,우 회전각도를 입력 할 수 있습니다.
적용 할 입력 값의 범위는 현재 계산 값에서 -30도에서 +20도까지 조정할 수 있습니다. (상대 값 계산)
Current angle: -4 Deformed angle: 0
|
|
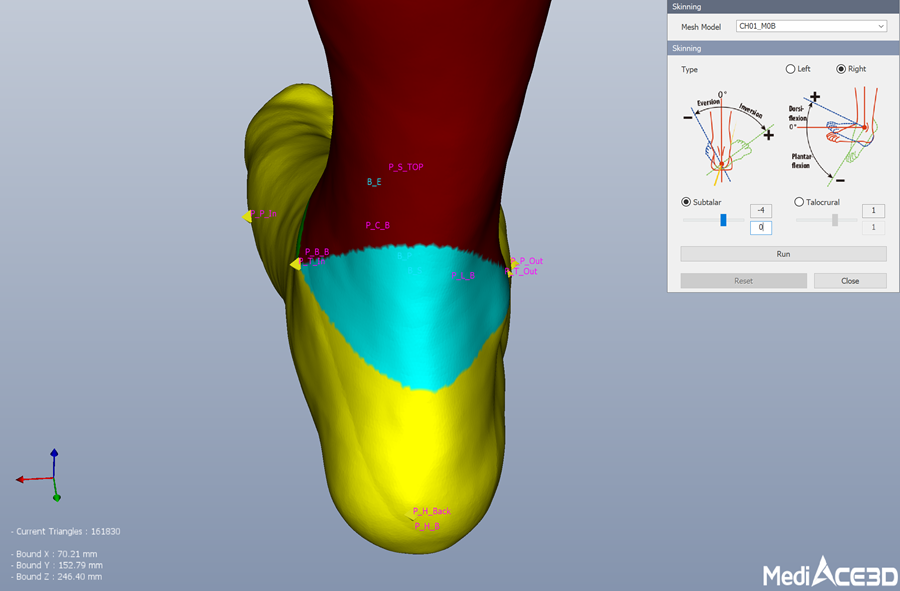
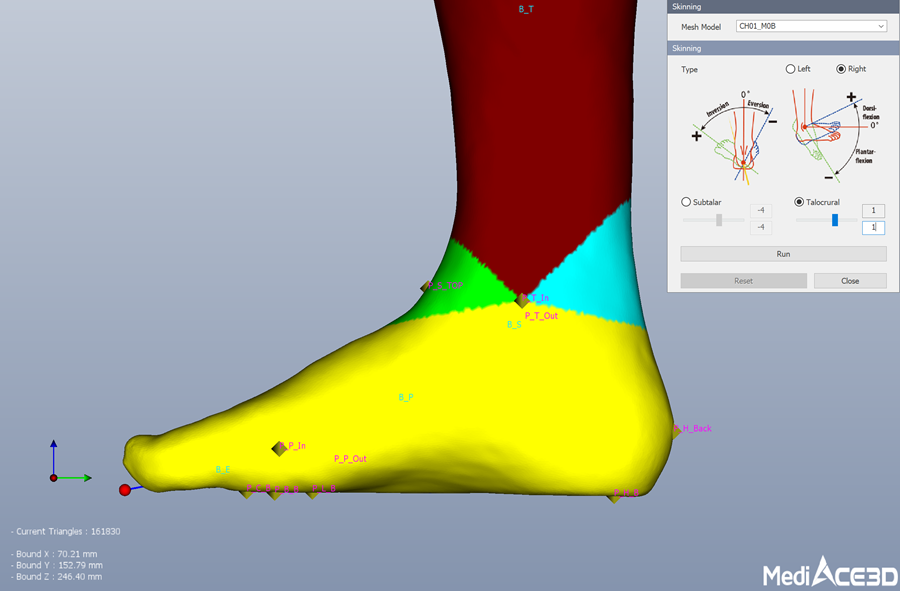
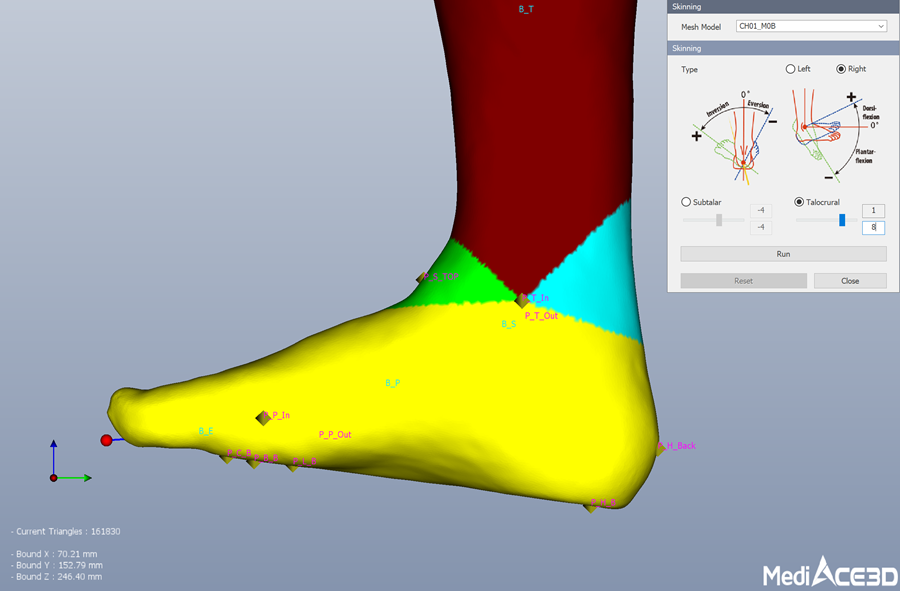
 TalocruralTalocrural은 talocrural joint(거퇴골)의 상, 하 발목의 각도를 조절합니다.
Talocrural 패널의 값은 현재 스캔 된 모델의 각도를 표시합니다. 그리고 스크롤바 옆에 상자에 상,하 회전각도를 입력할 수 있습니다.
적용할 입력 값의 범위는 -35도에서 20도 사이입니다. (절대 값 계산)
Current angle: 1 Deformed angle: 8
|
|
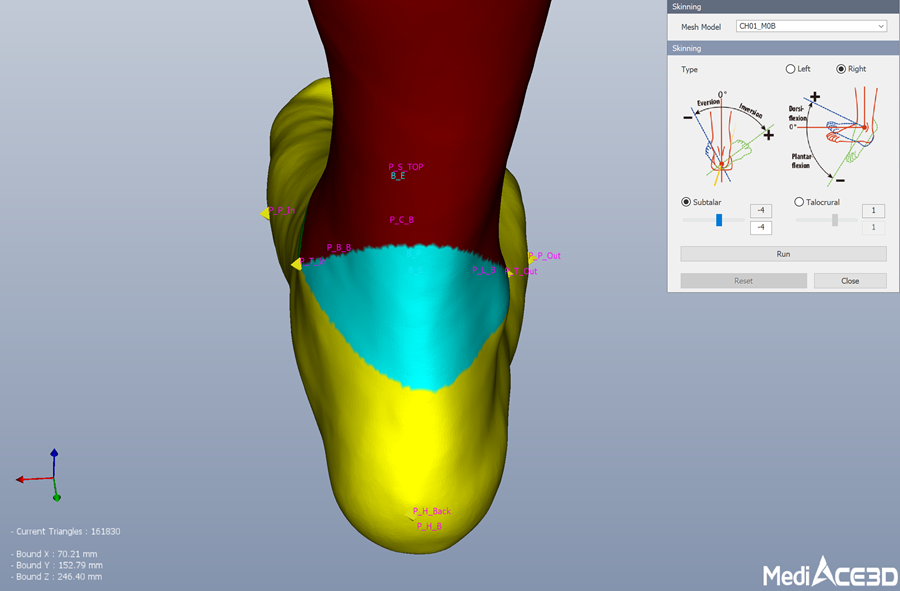
 Run스키닝 패널에 입력한 보정을 대상 메시 모델에 적용합니다.
스키닝 완료된 메시 모델로 대체됩니다.
※스키닝 기능의 관절각 교정은 한 번씩 실행됩니다.
※설정한 관절각을 다시 설정하기 위하여 사용자는 'reset' 기능으로 초기 위치로 되돌리고 스키닝을 다시 수행할 수 있습니다.
|
|
 Reset스키닝 변형 전의 초기 발 모델 상태로 돌아갑니다.
|
|