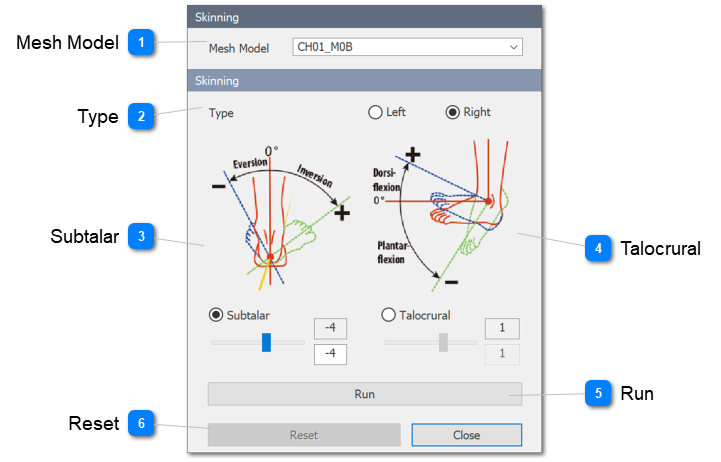
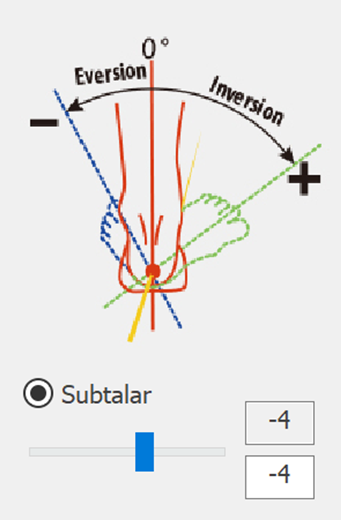
Subtalar controls inversion and eversion of the subtalar joint.
The value of the upper dimmed box displays the angle of the current scanned model. And user can input the angle for inversion/eversion into the lower box.
The range of input value to be applied can be adjusted from -20 degrees to +30 degrees from the current calculation value of the upper box.
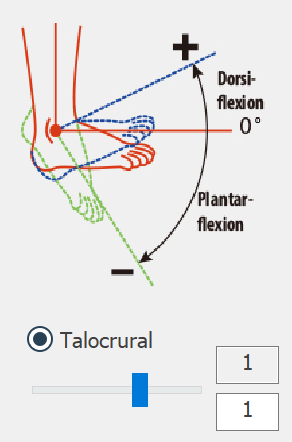
Talocrural controls dorsiflexion/plantarflexion of the talocrural joint.
The value of the upper dimmed box displays the angle of the current scanned model. And user can input the angle for dorsiflexion/plantarflexion into the lower box.
The range of input values to apply is between -35 degrees and 20 degrees.